What are good first optimizations before moving from one GPU to multi-GPU training?
Before moving from one GPU to multi-GPU training, it usually makes sense to exhaust the simpler single-GPU optimizations first. They are easier to debug, cheaper to run, and often deliver surprisingly large gains.
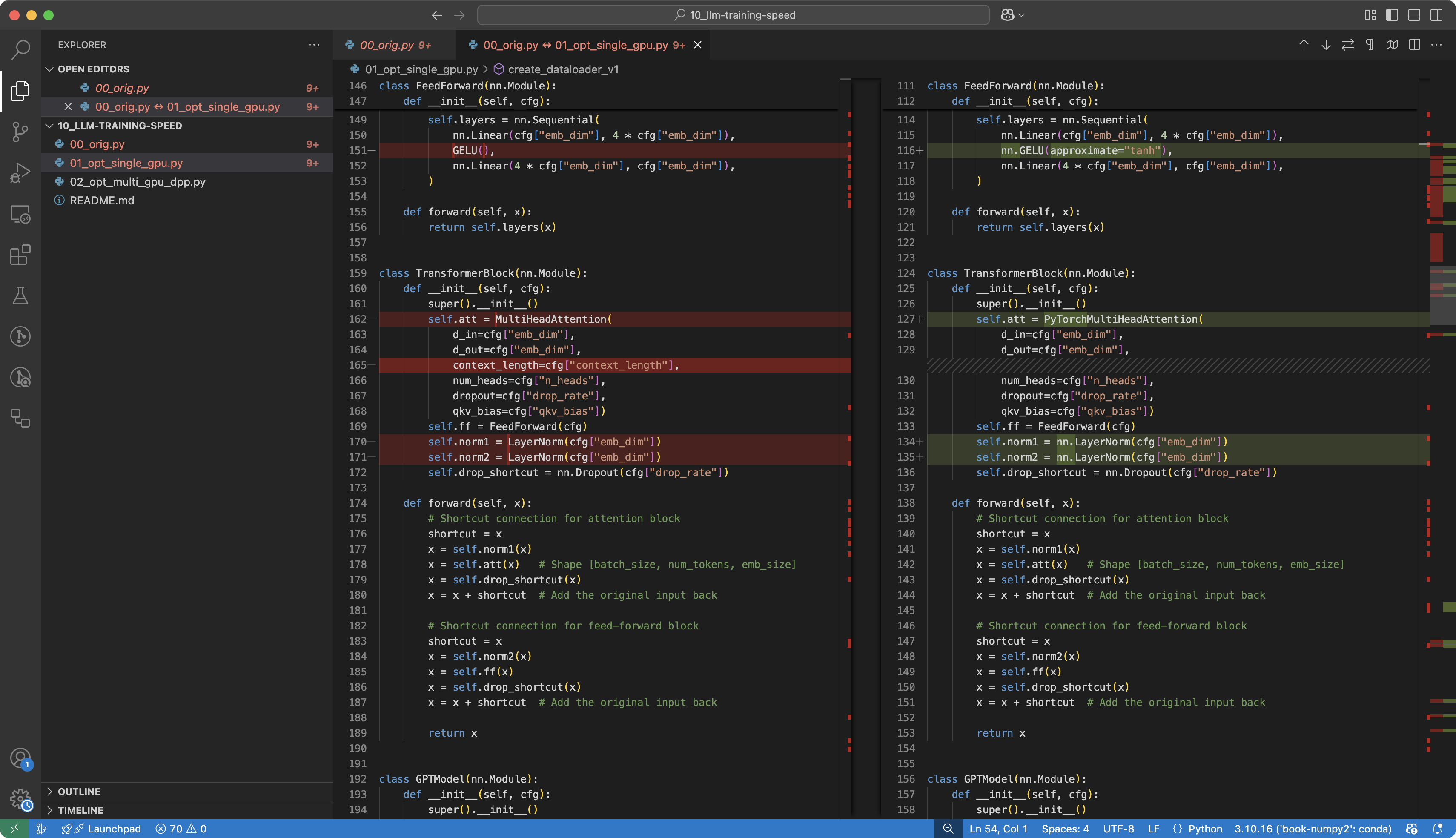
The repo’s training-speed material is a good example: a long sequence of single-GPU improvements dramatically increased throughput before distributed training entered the picture.
Good first optimizations include:
- using
bfloat16 - enabling tensor-core-friendly settings
- using fused optimizers
- enabling pinned memory in the data loader
- replacing from-scratch kernels with optimized PyTorch implementations where appropriate
- using FlashAttention
- trying
torch.compile - tuning batch size after the other optimizations are in place
These changes matter because distributed training adds a lot of complexity:
- process-group setup
- synchronization overhead
- harder debugging
- more failure modes
So if a single GPU is still leaving obvious speed or memory gains unused, multi-GPU is usually not the first thing to fix.

The practical rule is to move to multi-GPU when:
- the optimized single-GPU path is already reasonably efficient
- the model or data scale truly exceeds one GPU
- the added complexity is justified
In short, good first optimizations before multi-GPU training are mixed precision, efficient kernels, fused optimizers, better data loading, and compilation, because those changes often unlock large gains without distributed-training complexity.